A finales del año 2018, la empresa japonesa del mundo textil Uniqlo acordó reducir en un 90% la cantidad de sus empleados, pero, hasta el momento en esta empresa aún había la operación que requería que sus empleados cogieran y envolvieran las camisetas de forma suave y elegante.
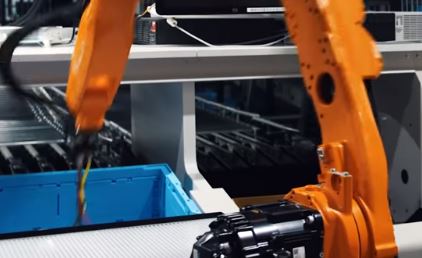
Uniqlo ha establecido una alianza con la startup japonesa Mujin, quien se ha encargado de crear robots de 2 extremidades que cogen niquis y las dejan con tacto en las cajas. Con esta acción, Uniqlo se halla a un paso de su completa automatización.
Máquinas y textil, rara fusión.
Mediante un programa de visión por ordenador, estos robots identifican las prendas. Después proceden a cogerlas con sus dos brazos robotizados y las colocan en sus cajas oportunas, de la misma manera que lo haría un empleado humano.
Este robot también consigue ordenar una caja con un cúmulo de prendas descolocadas que se encuentran en sus fundas de plástico. Para ello la máquina se encarga de tomar cada una de ellas y dejarlas de manera ordenada en la caja para continuar a su posterior envío.
Mecanización del ámbito textil
Se puede decir que la técnica de estos dispositivos robotizados industriales ha prosperado mucho, y no sólo en el mundo textil. Hay modelos que pueden recoger hojas de una impresora de manera individual y además situarlas en la caja cuidadosamente.
Empresas como Amazon aún dependen de recolectores humanos, aunque cada vez apuestan de forma más claro por la mecanización. Issei Takino, cofundador y CEO de Mujin, declara que “En el tema de los almacenes, no hay trabajadores que pierden su lugar de trabajo debido a que los empleados simplemente no están allí”.
La compañía propietaria de Uniqlo, Fast Retailing, realiza 1.300 millones de artículos textiles al año, vendiendo en 3.500 tiendas de más de 26 países distintos. Tiene como principal objetivo crear la ropa que sea exclusivamente imprescindible para los consumidores. En estos momentos cuenta con una multitud de robots que son capaces de simular el tacto que aplican los humanos al hacer estas labores.